TEL. 0143-46-5341
〒050-8585 北海道室蘭市水元町27-1
研究内容Research
超音速飛行に向けたUAV制御技術
3. 小型無人超音速機向け完全自律着陸を実証する制御系
研究目的
航空機が低速になる着陸時は,様々な不安定要因が発生するため,事故の確立が高いことで知られています.完全自律の着陸制御システムを構築し,精度の高い姿勢制御が実現できれば航空機を安定して着陸させることが
できます.加えて,実験を行いやすくするために,ILSなど地上設備を必要としないシステムを目指しています
着陸制御系構成
完全自律の着陸制御系を構築するにあたりはじめは不安定な機体ではなく,まずは推力・空力ともに安定した電動模型飛行機を使います.電動模型飛行機を基に構築した制御システムは
1.PC上でのシミュレーション
2.電動模型飛行機を飛行させ,実証する
という二段階の行程で行ます.
着陸は基本的に以下の流れで行います.
1.グライドスロープ制御で,一定の降下率で降下.
2.フレア制御を行い,滑らかに着陸.
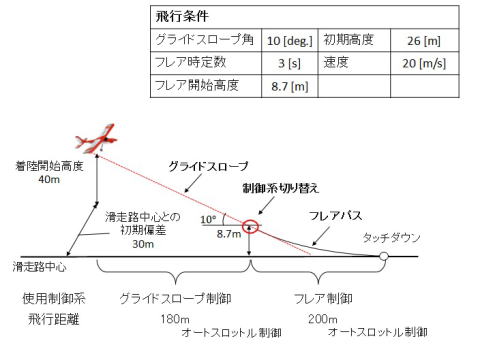
着陸プロファイル
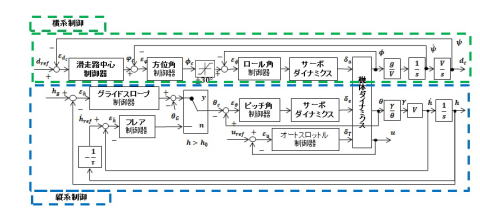
着陸制御系ブロック図
実証実験結果

飛行経路図
今後の展望
1. 着陸時の降下率を最小にする。2. 大きなグライドスロープ角で降下し、着陸する。
3. タッチダウンの位置精度を高める。

